Choose your operating system:
Windows
macOS
Linux
CCDIK (循环坐标下降逆动态学)骨架控制节点是一个轻量级的IK解算器(与 FABRIK 相似),通常用于驱动骨骼链。然而与FABRIK不同,CCDIK提供了定义角约束的功能,需要在解算中限制任意骨骼的旋转时较为实用。
CCDIK节点可用于驱动如下所示的过程化动画:
上方视频中使用了CCDIK节点属性的 解算器 部分并将角色的 根骨骼(Root Bone) 设为左肩。然后将 末端骨骼(Tip Bone) 设为角色食指上的最后一个数字。调整 执行器位置(Effector Location) 时,IK解算器将接管,链中的每块骨骼将基于定义的 每个关节的旋转限制(Rotation Limit Per Joints) 值来跟随。这些角限制可防止骨骼出现奇怪旋转,要实现需要的效果可能需要对值进行一些调整(以每根骨骼为基础)。
输入和输出引脚
以下列出了 CCDIK 节点的可用 输入 和 输出 引脚:

|
引脚类型 |
描述 |
|
|---|---|---|
|
输入引脚 |
||
|
执行器位置(Effector Location) |
指定末端骨骼的目标位置(如 执行器位置空间 设为 骨骼 )。这将是来自目标骨骼的偏移,用作目标位置。 |
|
|
组件姿势(Component Pose) |
要进行变换的输入姿势。 |
|
|
Alpha |
一个范围为[0.0, 1.0]的浮点值,用作alpha值来确定由骨骼控制应用的变形的权重。如值为0.0,则将为输入姿势赋予完整权重;而值为1.0时,则会为控制计算的变形赋予完整权重。 |
|
|
输出引脚 |
||
|
组件姿势(Component Pose) |
应用变换后的最终姿势。 |
|
节点属性
以下是使用CCDIK节点(可从
细节
面板中选用)时可用的属性:

|
选项 |
描述 |
|
|---|---|---|
|
执行器位置 |
||
|
(作为引脚)执行器位置(Effector Location) |
是否将此属性显示为节点上的一个引脚。 |
|
|
执行器位置空间(Effector Location Space) |
设置骨骼位置的坐标空间(场景空间、组件空间、父骨骼空间,或骨骼空间)。 |
|
|
执行器目标(Effector Target) |
如 执行器变换空间(Effector Transform Space) 是一块骨骼,这便是要使用的目标骨骼。 |
|
|
解算器 |
||
|
末端骨骼(Tip Bone) |
指定为链中末端骨骼(或最终骨骼)的骨骼。 |
|
|
根骨骼(Root Bone) |
指定为链中根骨骼(或初始骨骼)的骨骼。 |
|
|
精确度(Precision) |
从 执行器位置(Effector Location) 到最终末端位置差量的容差。 |
|
|
最大迭代数(Max Iterations) |
所允许的最大迭代数(用于控制性能)。 |
|
|
从尾部开始(Start from Tail) |
是否将轴绘制到调试关节旋转。 |
|
|
启用旋转限制(Enable Rotation Limit) |
从 执行器位置(Effector Location) 到最终末端位置差量的容差。 |
|
|
每个关节的旋转限制(Rotation Limit Per Joints) |
每根骨骼的对称旋转限制。索引0与 根骨骼 匹配,最后一个索引与 末端骨骼 匹配。 |
|
|
性能 |
||
|
LOD阈值(LOD Threshold) |
此节点允许运行的最大LOD。 |
|
|
Alpha |
||
|
Alpha输入类型(Alpha Input Type) |
定义Alpha输入类型(浮点值、布尔值或动画曲线值)。 |
|
|
(作为引脚) |
启用此项将 Alpha 属性作为引脚显示在节点上。禁用即可停止将其显示为引脚。 |
|
范例:按钮按压
下方视频中使用了CCDIK节点和一些 蓝图 ,让角色按下墙上的按钮。
下方动画蓝图的动画图表中使用了CCDIK节点,执行器位置从关卡中按键的位置进行驱动。如玩家在按钮的范围中并按下相应的键,则会混合到使用CCDIK节点的姿势,使角色到达执行器位置(按下按钮)。
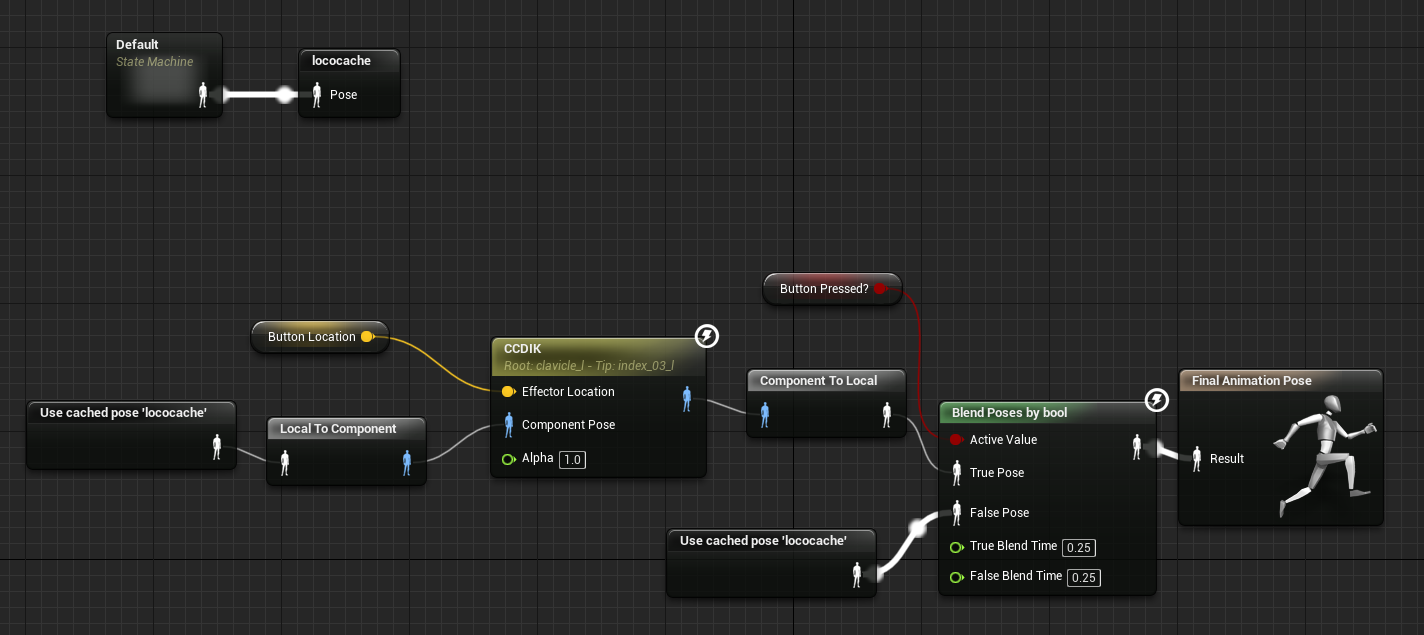
点击图片查看全图。
在下图中,我们将clavicle_l(左肩)指定为
根骨骼
、index_03_l(左手食指上最后一个数字)指定为骨骼链的
末端骨骼
。我们还定义使用
每个关节的旋转限制(Rotation Limit Per Joints)
部分来约束应用到每根骨骼的旋转量。
