Choose your operating system:
Windows
macOS
Linux
选择实现方法:
C++

你可以在本教程中使用自己的角色,前提是该角色已分配摄像机组件。如果你没有角色,建议你首先完成 使用摄像机组件 教程,创建本指南中使用的基本角色。
尽管可能无法消除摄像机中穿透关卡中对象的所有实例,但根据弹簧臂的设置,在摄像机被遮挡时自动移动摄像机的位置,然后在摄像机没有被遮挡时返回其默认位置,有助于减少它们。
创建弹簧臂组件
-
继续 使用摄像机组件 操作指南教程项目,打开 BP_CameraCharacter 蓝图。
-
在 组件(Components) 选项卡,点击 添加组件(Add Component) 按钮,然后搜索并选择 弹簧臂组件(Spring Arm Component) 。重命名组件为 SpringArmComp 。
![添加弹簧臂组件]()
-
在 组件(Components) 选项卡,将 CameraComp组件 拖放到 弹簧臂组件 进行连接。
![拖放摄像机组件到弹簧臂]()
-
在 组件(Components) 选项卡中选择 SpringArmComp**后,导航至 细节(Details) 面板。 弹簧臂组件** 有多种可用设置,如下所示。
分段
说明
套接字(Sockets)
提供将弹簧臂作为 骨骼网格体 或 套接字 上的 骨骼 父项的功能。
摄像机(Camera)
设置无碰撞时的弹簧臂长度,并设置 偏移 。
摄像机碰撞(Camera Collision)
设置是否检查碰撞,并定义检查碰撞的查询探针大小。
摄像机设置(Camera Settings)
设置是否从父级继承 Pitch 、 Yaw 或 Roll 或 使用Pawn控制旋转 。
滞后(Lag)
设置摄像机是否应落后于目标位置以及与滞后相关的设置。
-
在 变换(Transform) 类别,更改 位置(Location) 值为(0,0,150),然后更改 旋转(Rotation) 值为(0,0,90)。
![变换类别位置和旋转设置]()
-
在 摄像机设置(Camera Settings) 类别,点击 使用Pawn控制旋转(Use Pawn Control Rotation) 变量旁边的复选框,启用后 弹簧臂组件 的父项后将使用查看/控制Pawn(你的 CameraCharacter )的旋转。
![启用使用Pawn控制旋转复选框]()
-
在 滞后(Lag) 类别中,点击 启用摄像机滞后(Enable Camera Lag) 变量旁边的复选框,启用后摄像机将落后于目标位置,这将使运动更平稳。
![启用摄像机滞后复选框]()





设置角色输入
为了演示新实现弹簧臂组件的功能,你需要将移动输入添加到角色类中。
-
首先导航至 编辑(Edit)>项目设置(Project Settings)>引擎(Engine)>输入(Input) ,然后在 绑定(Bindings) 类别,点击 轴映射(Axis Mappings) 旁边的 + 号目标,创建新轴输入。
![项目设置轴映射]()
-
将此轴映射命名为 MoveForward ,然后从键映射菜单搜索并选择 W键值 。
![向前移动W键]()
-
点击 MoveForward轴映射(MoveForward Axis Mapping) 旁边的 + 号,添加额外键。从下拉菜单,搜索并选择 S键 ,然后设置 缩放(Scale) 值为 -1.0 。
![向前移动S键]()
-
点击 轴映射(Axis Mappings) 旁边的 + 号,创建新轴输入。将此输入命名为 MoveRight 。
![向右移动轴映射]()
-
点击 MoveRight轴映射(MoveRight Axis Mapping) 旁边的 + 号,创建额外键,然后设置 向右移动(Move Right) 键映射,使用值分别为 1.0 和 -1.0 的 D 和 S 键 缩放,如下图所示。
![向右移动S和D键]()
-
在 绑定(Bindings) 类别,点击 轴映射(Axis Mappings) 旁边的 + 号,创建名为 Turn 的新输入,然后搜索并选择输入映射键的 鼠标X(Mouse X) 。
![绑定转动鼠标X]()
-
在 绑定(Bindings) 类别,点击 轴映射(Axis Mappings) 旁边的 + 号,创建名为 LookUp 的新输入,然后搜索并选择输入映射键的 鼠标Y(Mouse Y) ,将其 缩放(Scale) 值设置为 -1.0 。
![绑定查询鼠标负Y]()
-
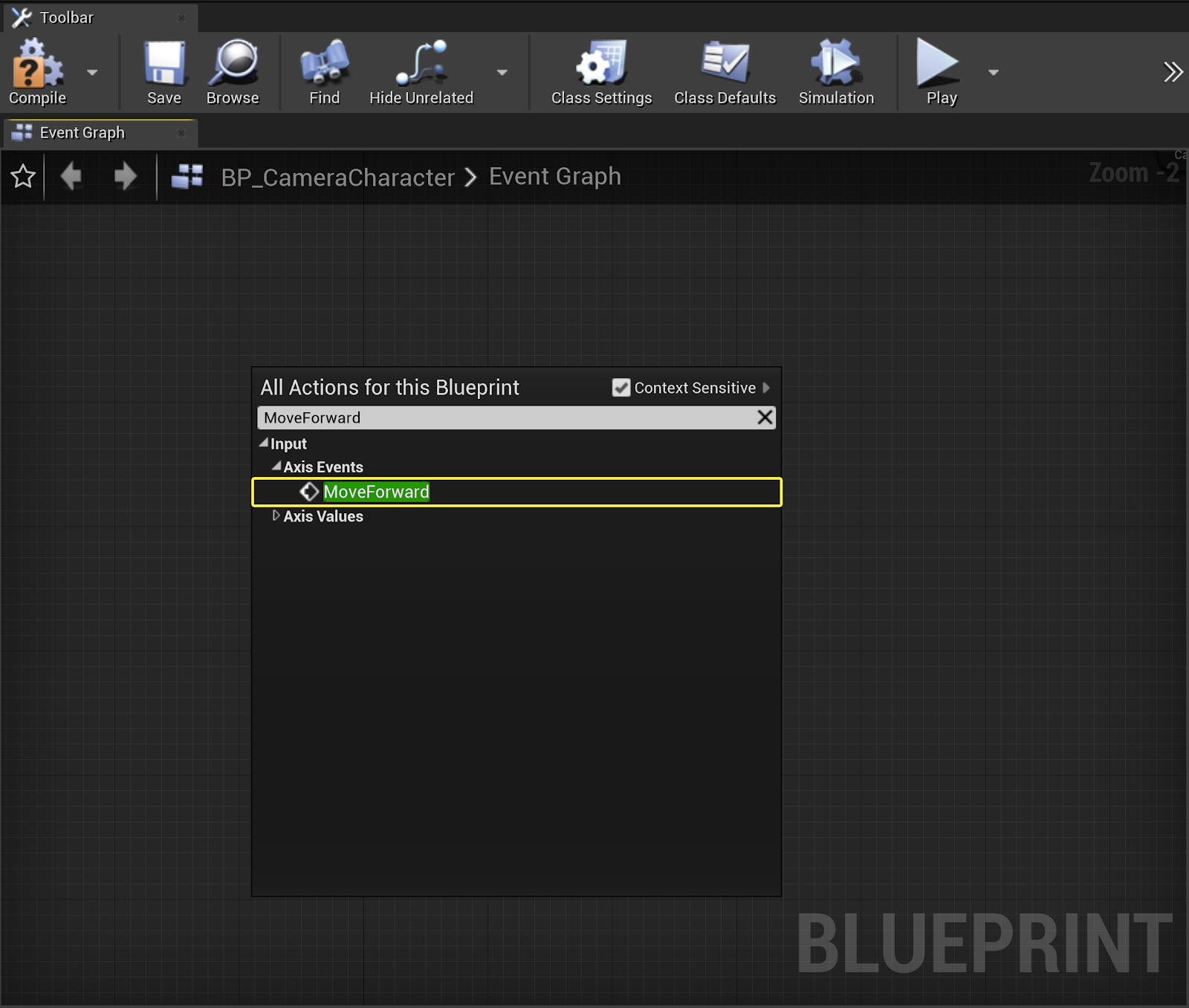
然后,双击 BP_CameraCharacter ,并导航至 事件图表(Event Graph) ,右键点击图表,搜索并选择 输入轴事件(Input Axis Event) 的 MoveForward 。
![添加向前移动输入轴事件]()
点击查看大图
-
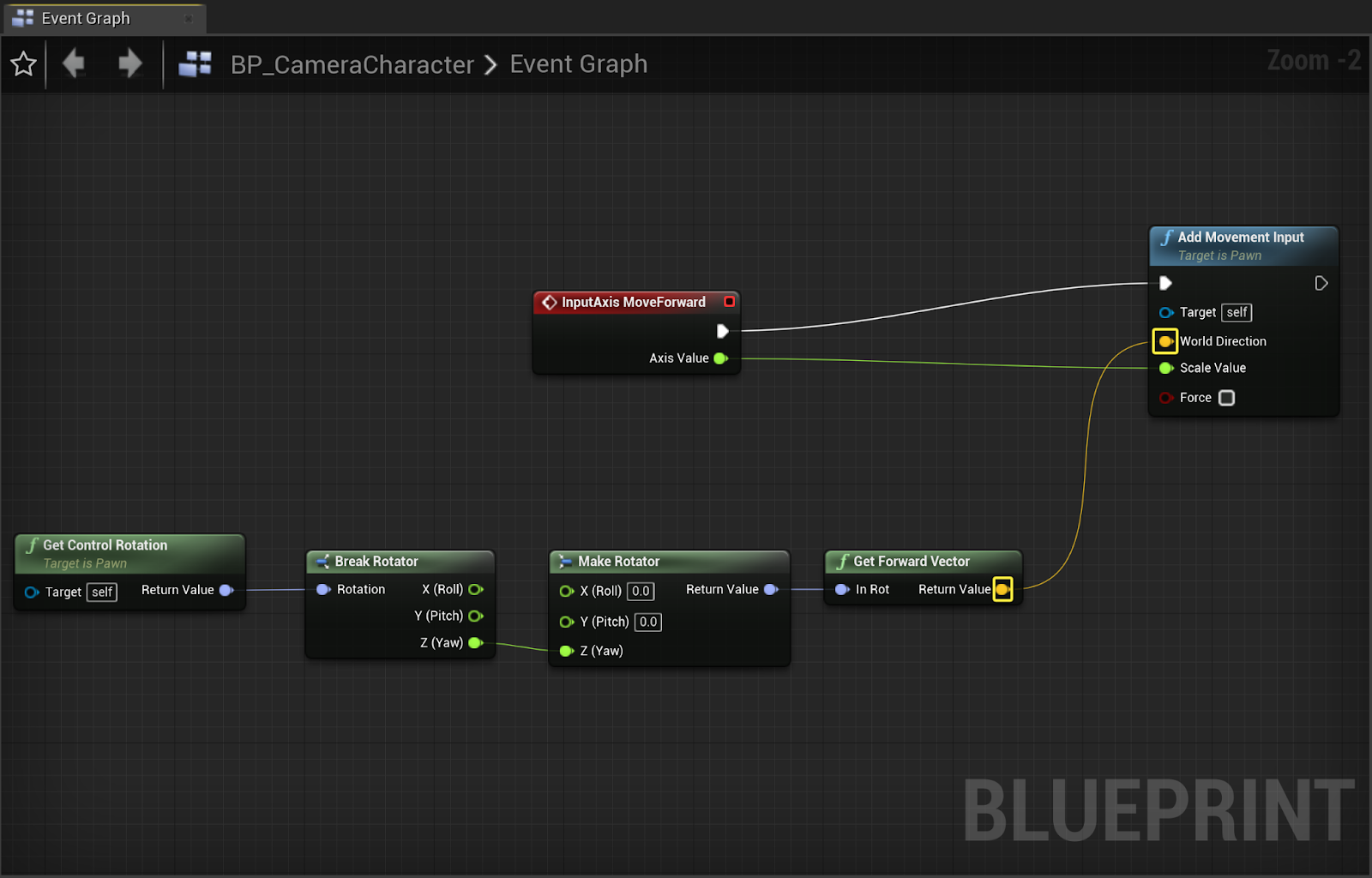
拖移 InputAxis Move Forward 节点的 执行(Execution) 引脚,在 下拉菜单 搜索并选择 Add Movement Input 节点,然后从 InputAxis Move Forward 节点拖移 轴值(Axis Value) 引脚,并连接到 Add Movement Input 节点的 缩放值(Scale Value) 引脚。
![连接输入轴向前移动添加移动输入]()
点击查看大图
-
右键点击 事件图表(Event Graph) ,在 上下文菜单 搜索并选择 Get Control Rotation ,然后从 旋转体返回值(Rotator Return Value) 引脚拖移,并在 下拉菜单 搜索和选择 Break Rotator 。
![连接Get Control Rotation到Break Rotator]()
点击查看大图
-
从 Break Rotator 节点,拖移 Z(Yaw) 引脚,在 下拉菜单 搜索并选择 Make Rotator 节点,然后,拖移 Make Rotator 节点的 旋转体返回值(Rotator Return Value) 引脚,在下拉菜单搜索并选择 获取向前矢量(Get Forward Vector) 。
![连接Break Rotator到Make Rotator获取向前矢量]()
点击查看大图
-
从 Get Forward Vector 节点,拖移 矢量返回值(Vector Return Value) 引脚,将其连接到 Add Movement Input 节点的 世界方向(World Direction) 引脚。
![连接Get Forward Vector添加移动输入]()
点击查看大图
-
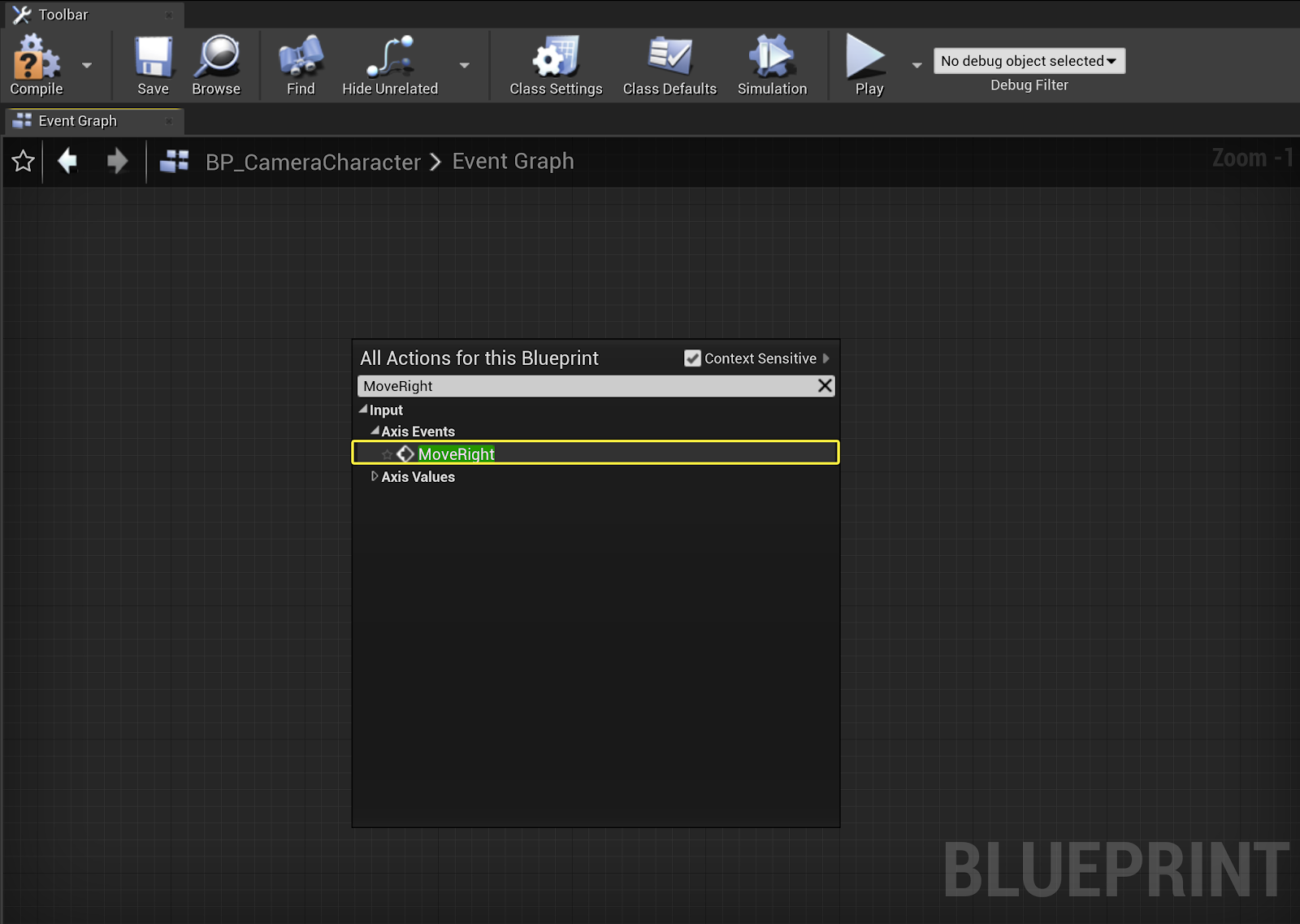
再次右键点击 事件图表(Event Graph) ,搜索并为你的 输入轴事件 选择 向右移动(Move Right) 。
![添加向右移动输入轴事件]()
点击查看大图
-
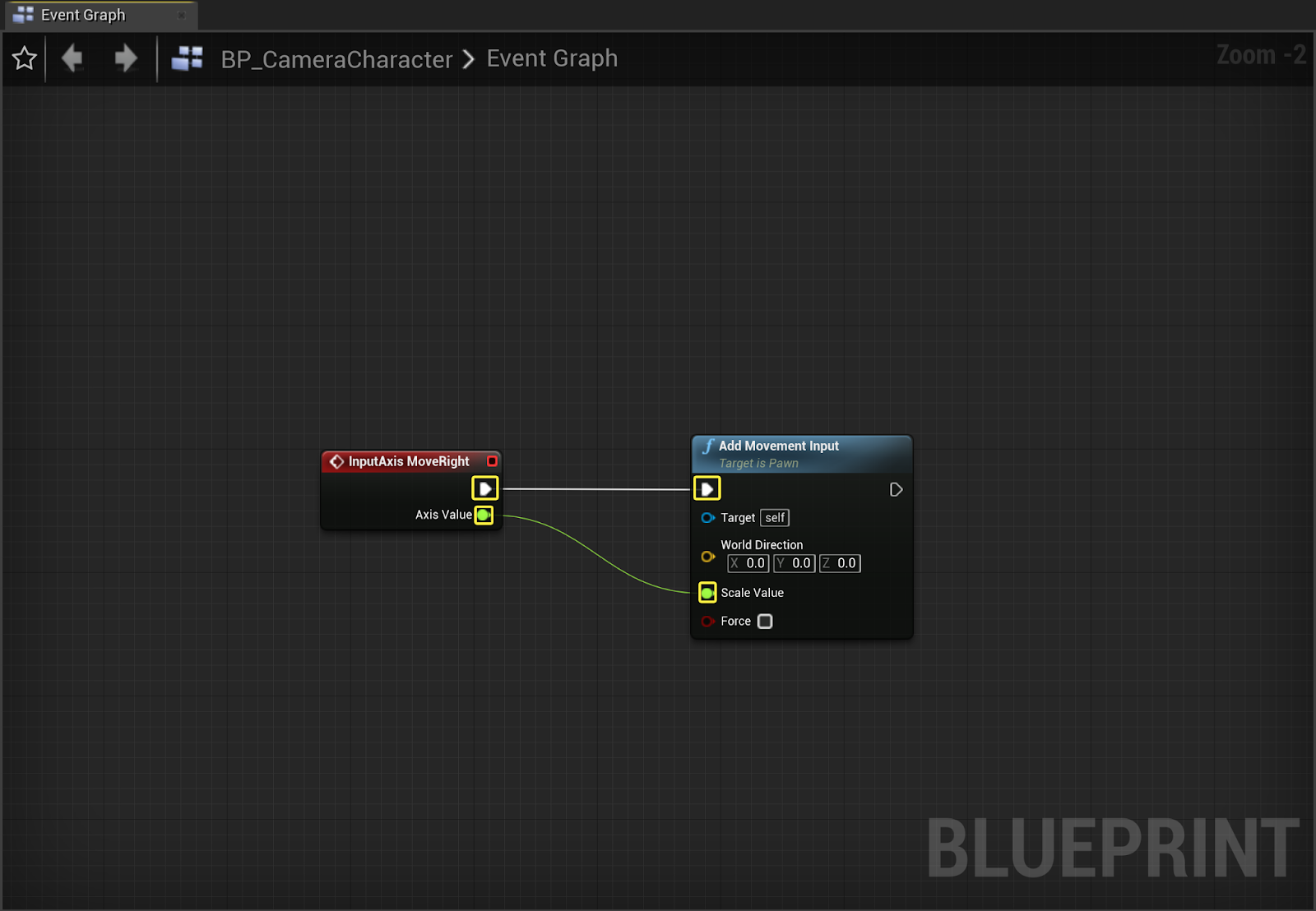
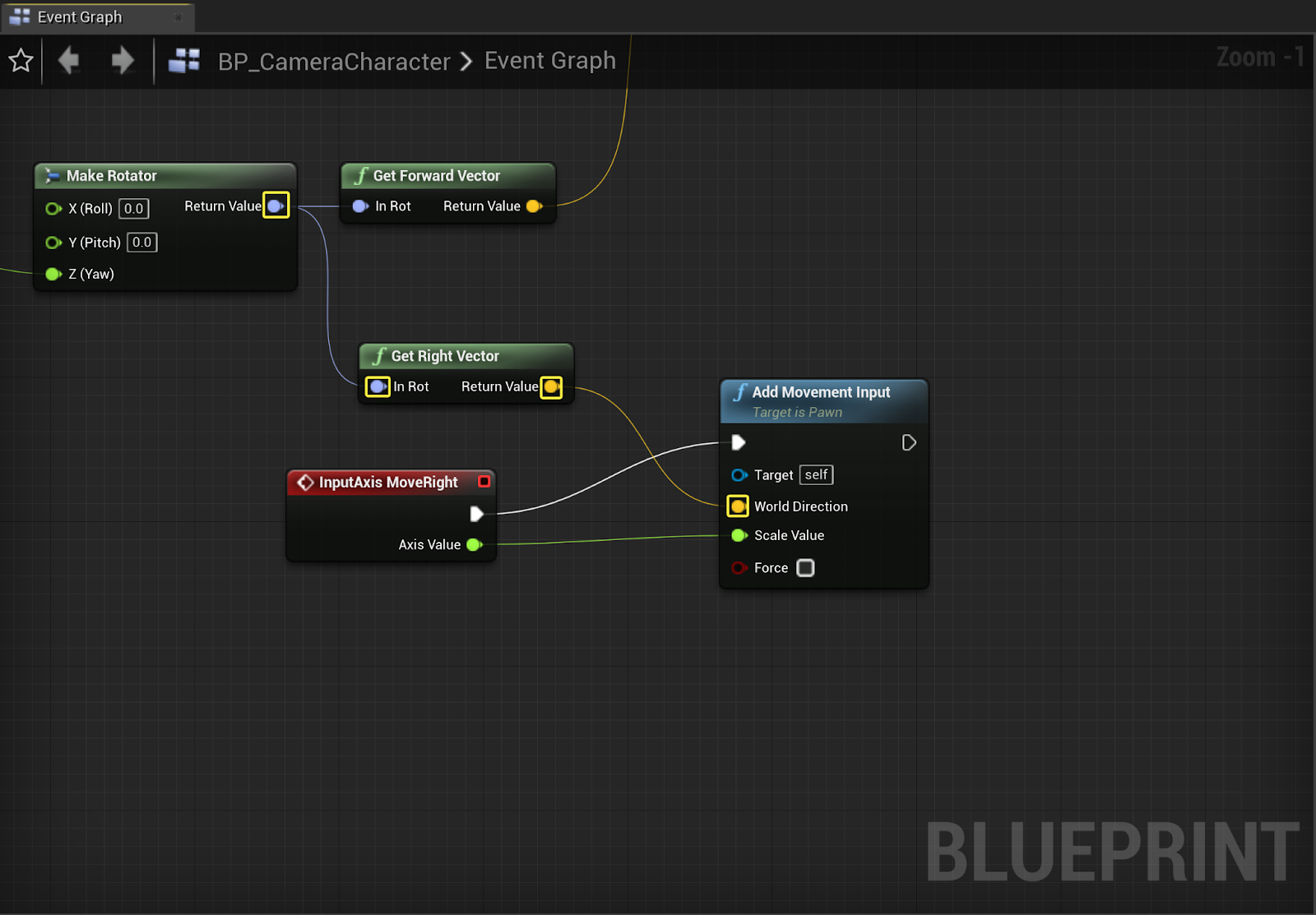
从 InputAxis MoveRight 节点拖移 执行(Execution) 引脚,在 下拉菜单 搜索并选择 Add Movement Input 节点,然后从 InputAxis MoveRight 节点连接 轴值(Axis Value) 引脚到 Add Movement Input 的 缩放值(Scale Value) 引脚。
![连接Input Axis Move Right添加移动输入]()
点击查看大图
-
从 Make Rotator 节点,拖移 旋转体返回值(Rotator Return Value) 引脚,在 下拉菜单 搜索并选择 Get Right Vector 节点,然后拖移 矢量返回值(Vector Return Value) 引脚,并将其连接到 Add Movement Input 节点的 世界方向(World Direction) 引脚。
![连接Make Rotator到Get Right Vector添加移动输入]()
点击查看大图
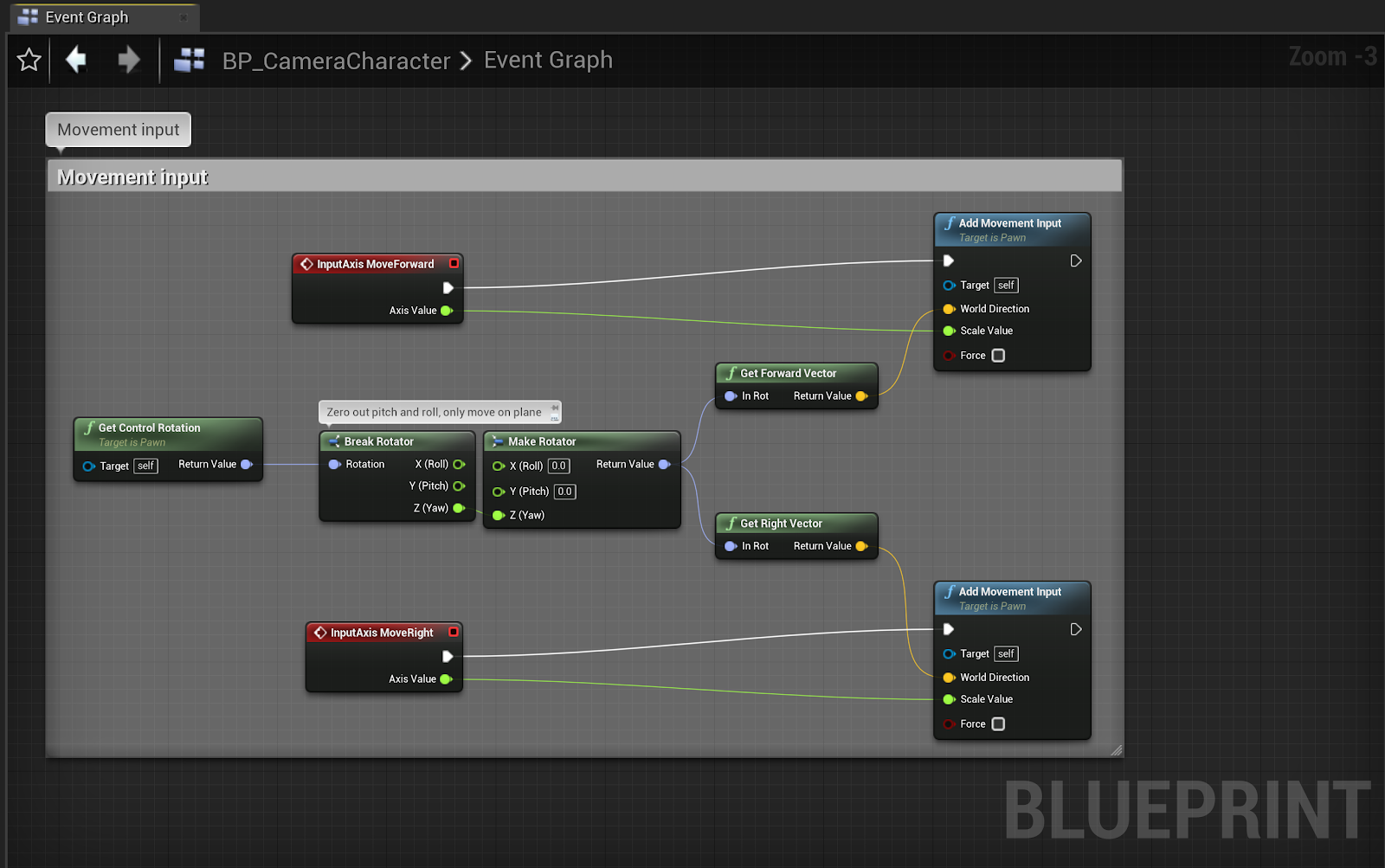
已完成 移动输入事件 将如下图显示。
![已完成移动输入事件]()
点击查看大图
-
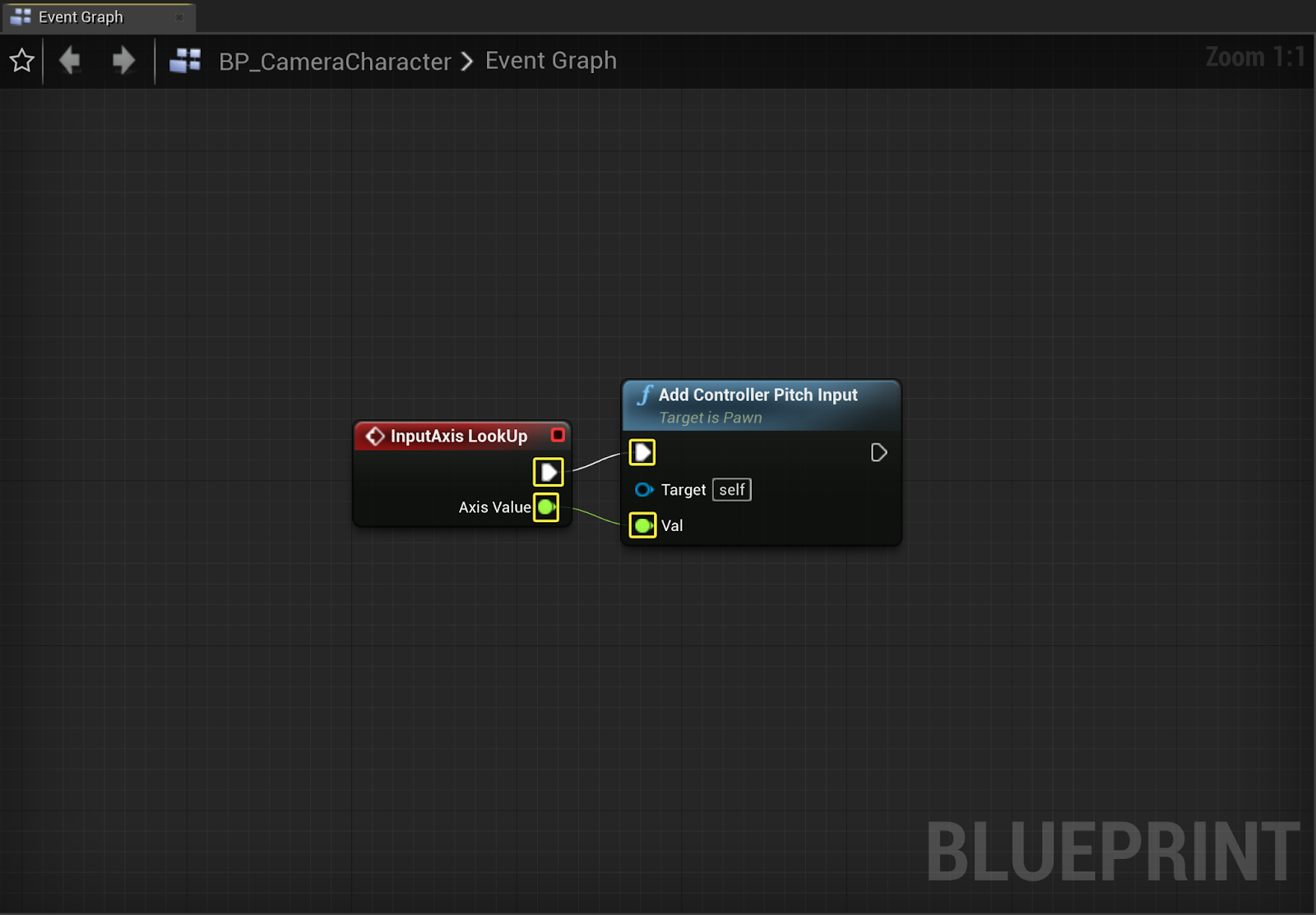
右键点击 事件图表(Event Graph) ,然后搜索并选择 InputAxis LookUp 事件节点,然后右键点击,搜索并选择 Add Controller Pitch Input 节点。
-
从 InputAxis LookUp 节点的 Axis Value 引脚拖移,并连接到 Add Controller Pitch Input 节点的 Val 引脚。从 InputAxis LookUp 节点的 执行输出 引脚拖移,并连接到 Add Controller Pitch Input 节点的 执行输入 引脚。
![连接Input Axis Look Up到Add Controller Pitch Input]()
点击查看大图
-
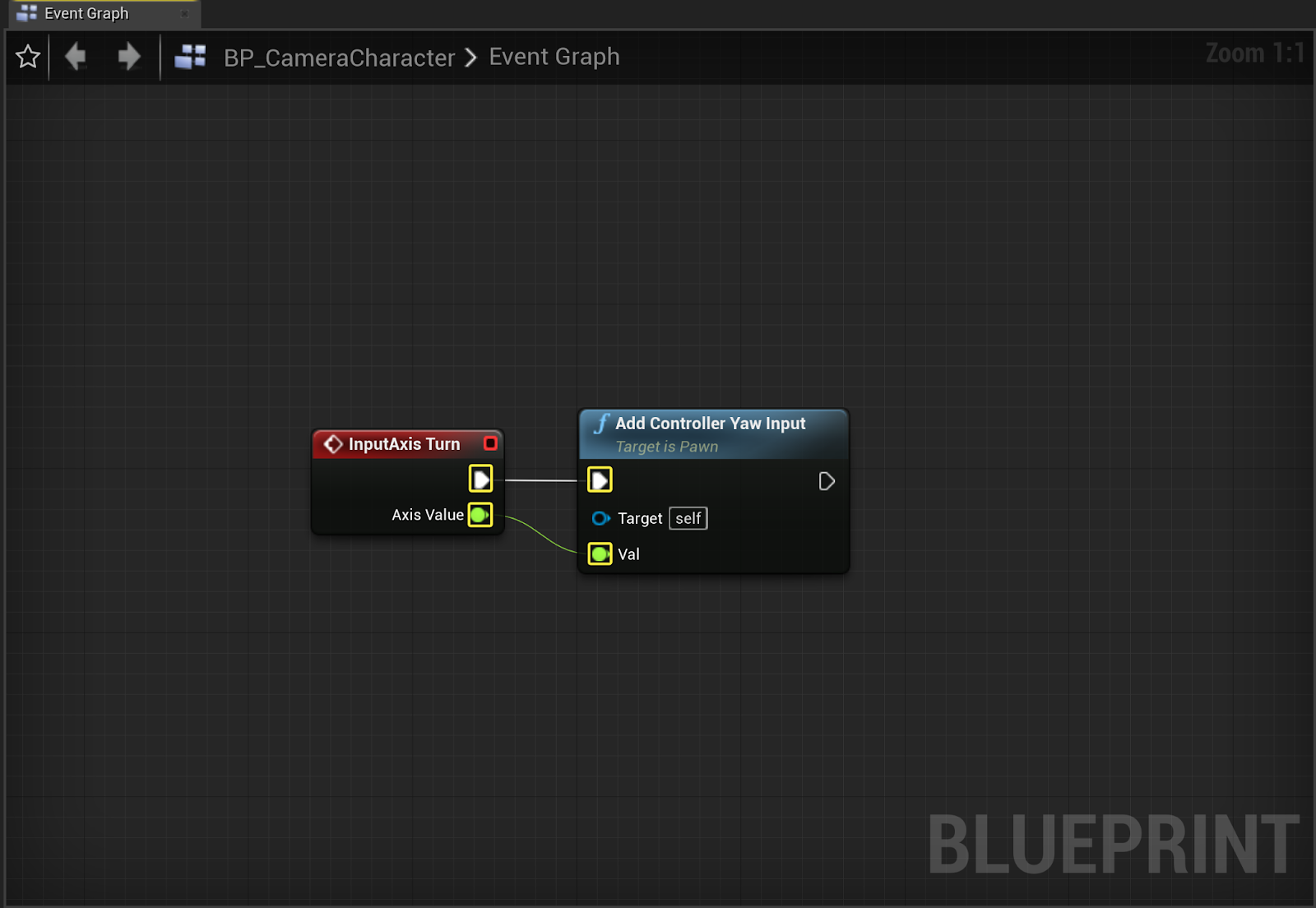
右键点击 事件图表(Event Graph) ,然后搜索并选择 Input Axis Turn 事件节点,然后右键点击,搜索并选择Add Controller Yaw Input节点。
-
从 Input Axis Turn 节点的 轴值(Axis Value) 引脚拖移,并连接到 Add Controller Yaw Input 节点的 Val 引脚。从 Input Axis Turn 节点的 执行输出 引脚拖移,并连接到 Add Controller Yaw Input 节点的 执行输入 引脚。
![连接Input Axis Turn到Add Controller Yaw Input]()
点击查看大图
-
点击 编译 并 保存 。
![编译和保存]()











为了演示新实现弹簧臂组件的功能,你需要将移动输入添加到角色类中。
-
首先导航至 编辑(Edit)>项目设置(Project Settings)>引擎(Engine)>输入(Input) ,然后在 绑定(Bindings) 类别,点击 轴映射(Axis Mappings) 旁边的 + 号目标,创建新轴输入。
![项目设置轴映射]()
-
将此轴映射命名为 MoveForward ,然后从键映射菜单搜索并选择 W键值 。
![向前移动W键]()
-
点击 MoveForward轴映射(MoveForward Axis Mapping) 旁边的 + 号,添加额外键。从下拉菜单,搜索并选择 S键 ,然后设置 缩放(Scale) 值为 -1.0 。
![向前移动S键]()
-
点击 轴映射(Axis Mappings) 旁边的 + 号,创建新轴输入。将此输入命名为 MoveRight 。
![向右移动轴映射]()
-
点击 MoveRight轴映射(MoveRight Axis Mapping) 旁边的 + 号,创建额外键,然后设置 向右移动(Move Right) 键映射,使用值分别为 1.0 和 -1.0 的 D 和 S 键 缩放,如下图所示。
![向右移动S和D键]()
-
在 绑定(Bindings) 类别,点击 轴映射(Axis Mappings) 旁边的 + 号,创建名为 Turn 的新输入,然后搜索并选择输入映射键的 鼠标X(Mouse X) 。
![绑定转动鼠标X]()
-
在 绑定(Bindings) 类别,点击 轴映射(Axis Mappings) 旁边的 + 号,创建名为 LookUp 的新输入,然后搜索并选择输入映射键的 鼠标Y(Mouse Y) ,将其 缩放(Scale) 值设置为 -1.0 。
![绑定查询鼠标负Y]()
-
然后,在
CameraCharacter.cpp中为 ACamerCharacter::MoveFoward 和 ACameraCharacter::MoveRight 类方法实现以下逻辑void ACameraCharacter::MoveForward(float AxisValue) { if ((Controller != nullptr) && (AxisValue != 0.0f)) { // 找出向前方向 const FRotator Rotation = Controller->GetControlRotation(); const FRotator YawRotation(0, Rotation.Yaw, 0); // 获取向前矢量 const FVector Direction = FRotationMatrix(YawRotation).GetUnitAxis(EAxis::X); AddMovementInput(Direction, AxisValue); } } void ACameraCharacter::MoveRight(float AxisValue) { if ((Controller != nullptr) && (AxisValue != 0.0f)) { // 找出向右方向 const FRotator Rotation = Controller->GetControlRotation(); const FRotator YawRotation(0, Rotation.Yaw, 0); // 获取向右矢量 const FVector Direction = FRotationMatrix(YawRotation).GetUnitAxis(EAxis::Y); // 以该方向增加移动 AddMovementInput(Direction, AxisValue); } } -
接下来导航至 ACameraCharacter::SetupPlayerInputComponent 方法,并实现以下代码。
//用于将功能绑定到输入 void ACameraCharacter::SetupPlayerInputComponent(UInputComponent*) { Super::SetupPlayerInputComponent(PlayerInputComponent); PlayerInputComponent->BindAxis("MoveForward",this, &ACameraCharacter::MoveForward); PlayerInputComponent->BindAxis("MoveRight", this, &ACameraCharacter::MoveRight); PlayerInputComponent->BindAxis("Turn", this, &APawn::AddControllerYawInput); PlayerInputComponent->BindAxis("LookUp", this, &APawn::AddControllerPitchInput); }
角色 类继承至 Pawn 类。在此示例中,我们使用Pawn的 AddControllerPitchInput 和 AddControllerYawInput 类方法处理我们的Turn和LookUp逻辑。
关卡设置
要演示弹簧臂组件的功能,你需要在关卡中放置一些几何障碍物。
-
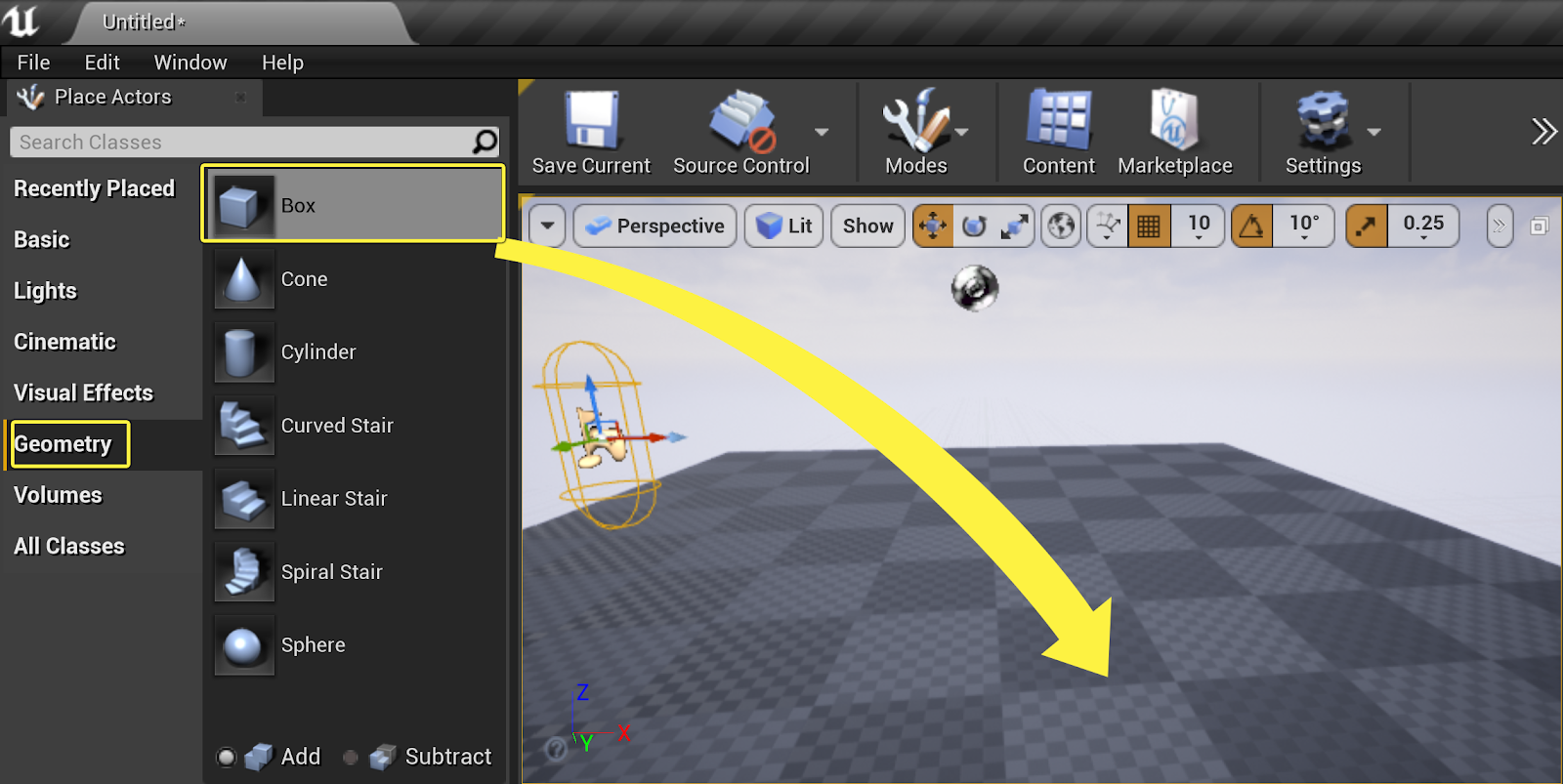
在 编辑器(Editor) 中,导航至 窗口(Window)>(放置Acotr(Place Actors) ,打开 放置Actors(Place Actors) 面板。
-
在 放置Actor(Place Actors) 面板,选择 几何体(Geometry) 选项卡,将 盒体笔刷(Box Brush) 拖放至关卡中。
![放置盒体笔刷]()
点击查看大图
-
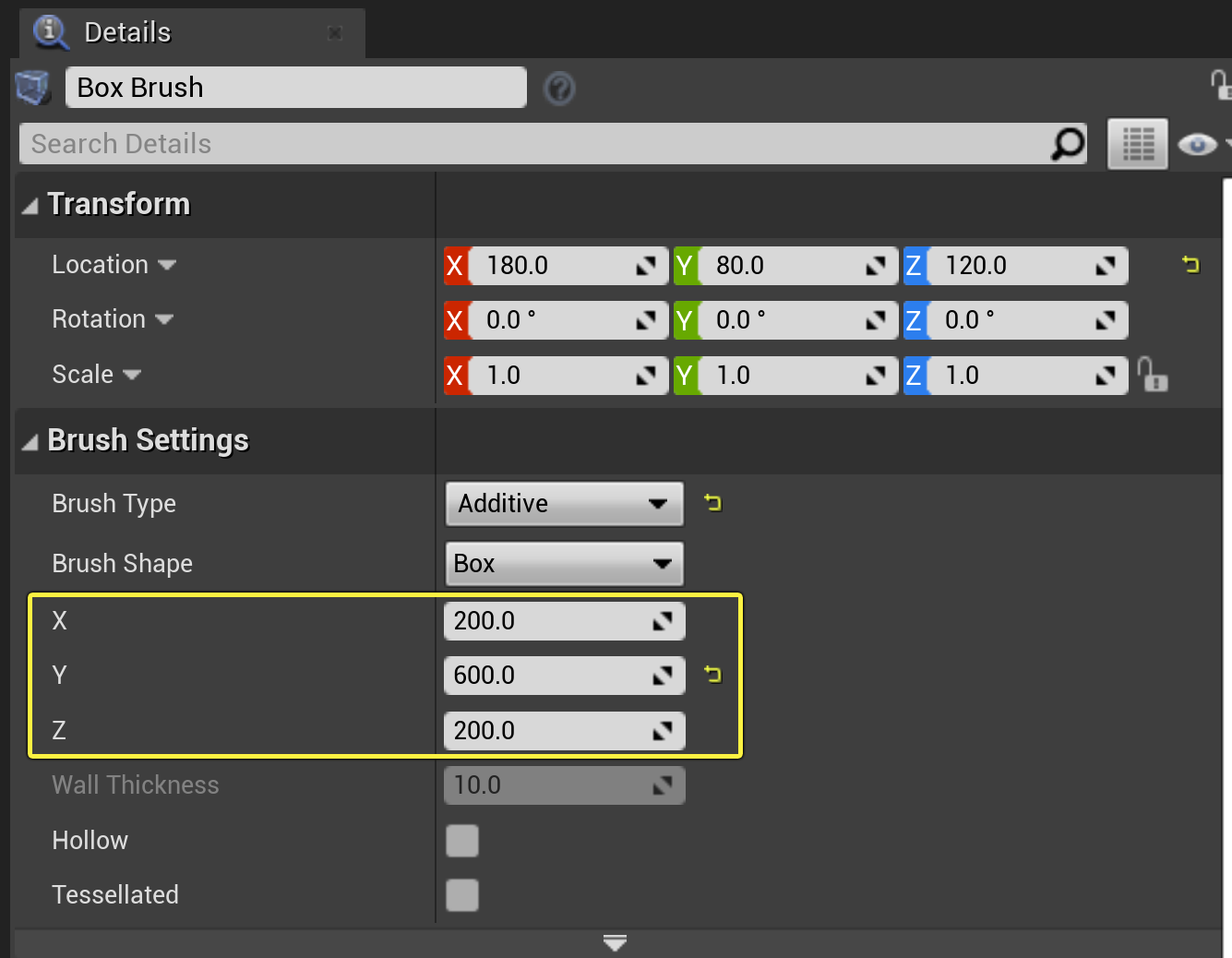
在 细节(Details) 面板中,你可以导航至 笔刷设置(Brush Settings) 类别,调整 盒体笔刷(Box Brush) 的边界,并调整 X 、 Y 和 Z 值。
![调整盒体笔刷设置]()
点击查看大图
-
然后,从 工具栏(Toolbar) ,按 在编辑器中运行(PIE(Play In Editor)) 。
![在编辑器中运行工具栏]()

最终结果

使用 WASD 移动角色时,你将注意到摄像机略有落后于角色的移动。另外,当你在墙壁附近导航角色时,摄像机会试图重新定位自己,并移动靠近。当角色没有被遮挡时,弹簧臂返回摄像机至默认类属性中指定的默认 目标臂长度 。